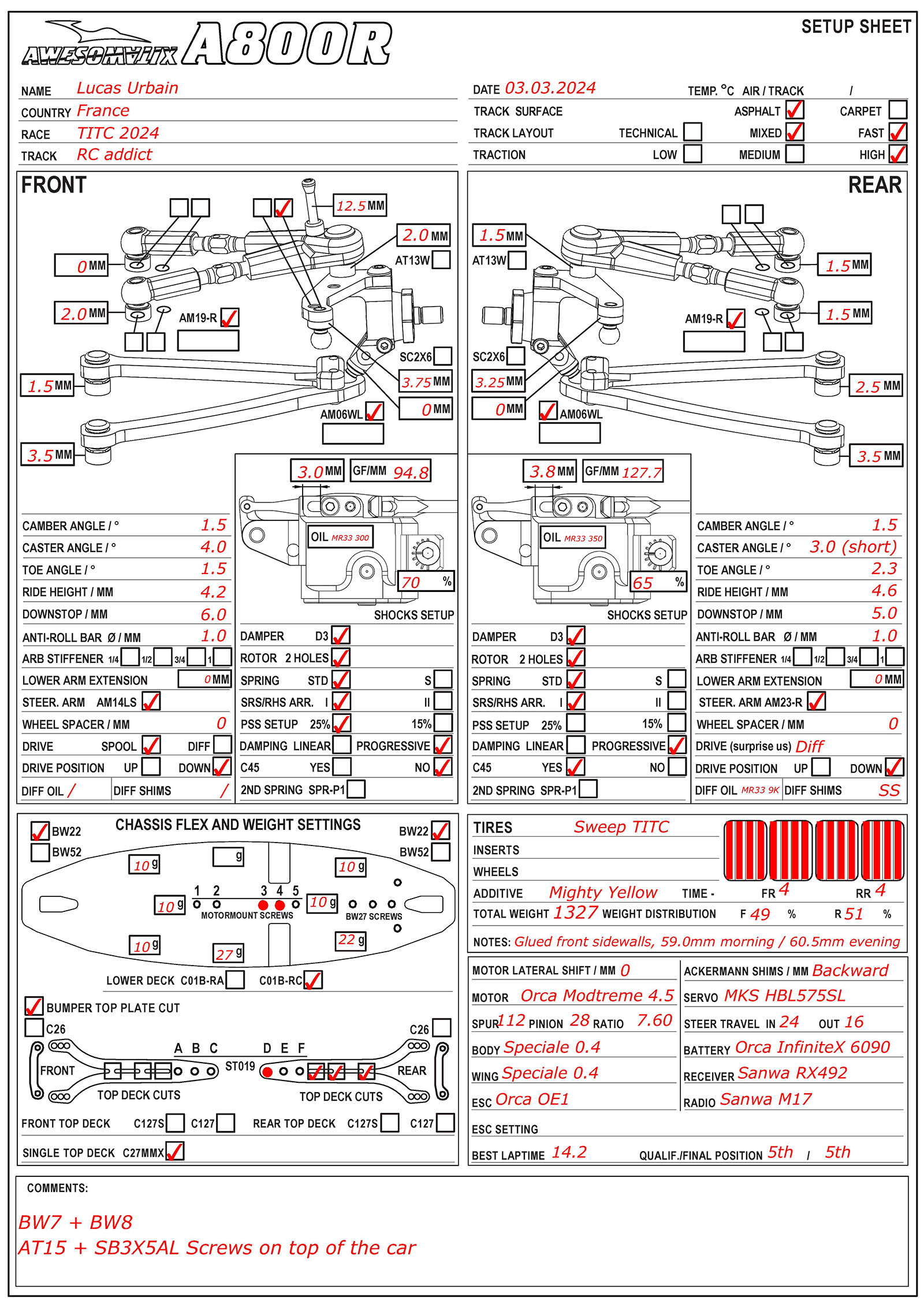
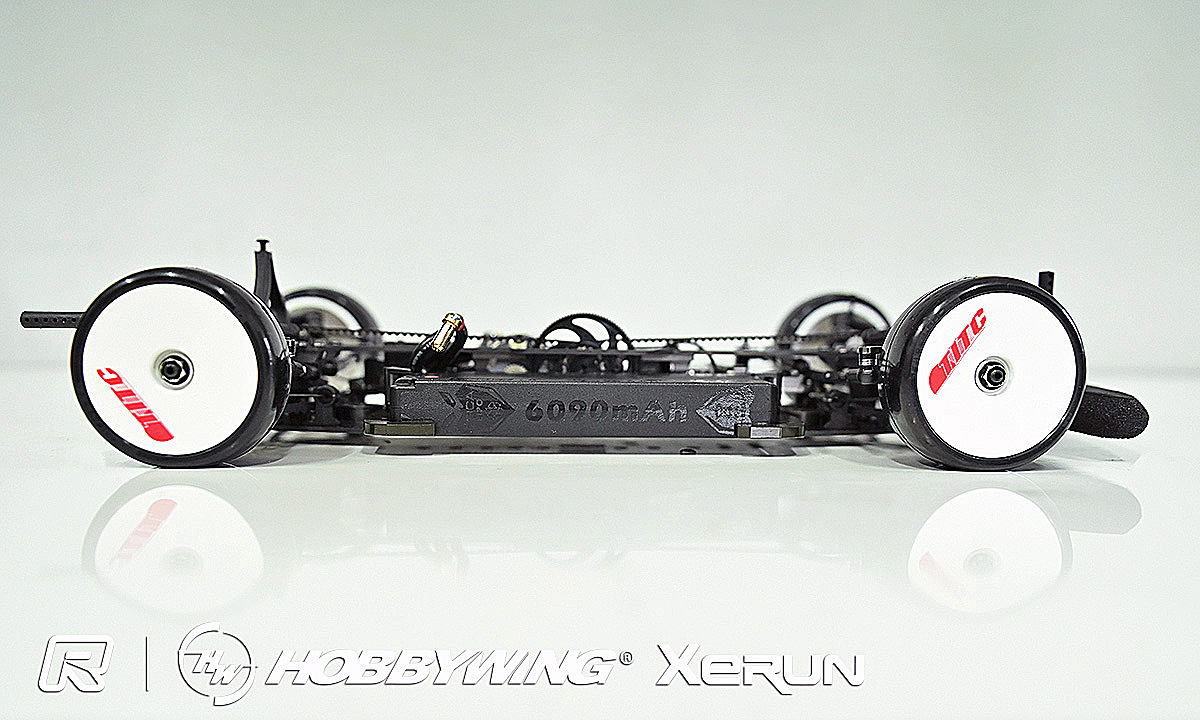
Crazy conditions opened the door for unique setup choices (some discovered purely by accident :s). Whether this setup will work anywhere else remains to be seen (doubt!). Some key features of this year's setup include the following:
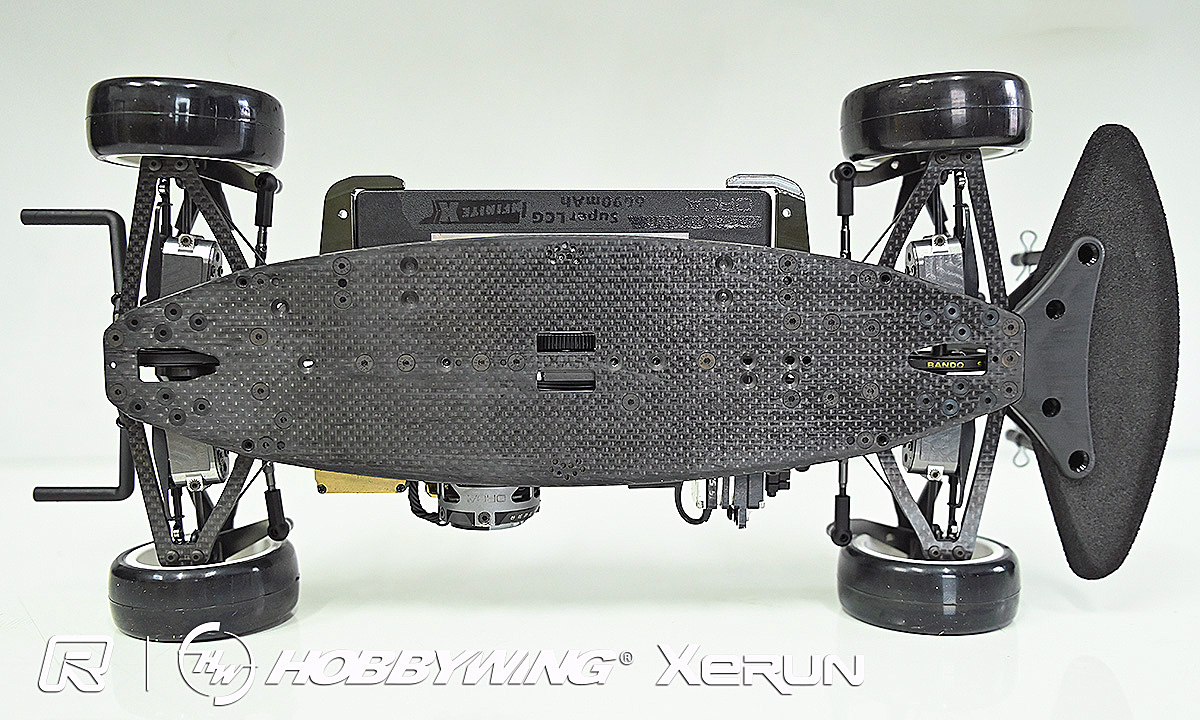
- Single piece upper deck: better forward traction at high speed (very noticeable in the double right hander into straight) and better mid corner stability at low speed.
- Tire sidewall gluing: perhaps the most important thing to do to fine tune for the changing track conditions, the hard part being able to guess what the track was gonna do ahead of time...
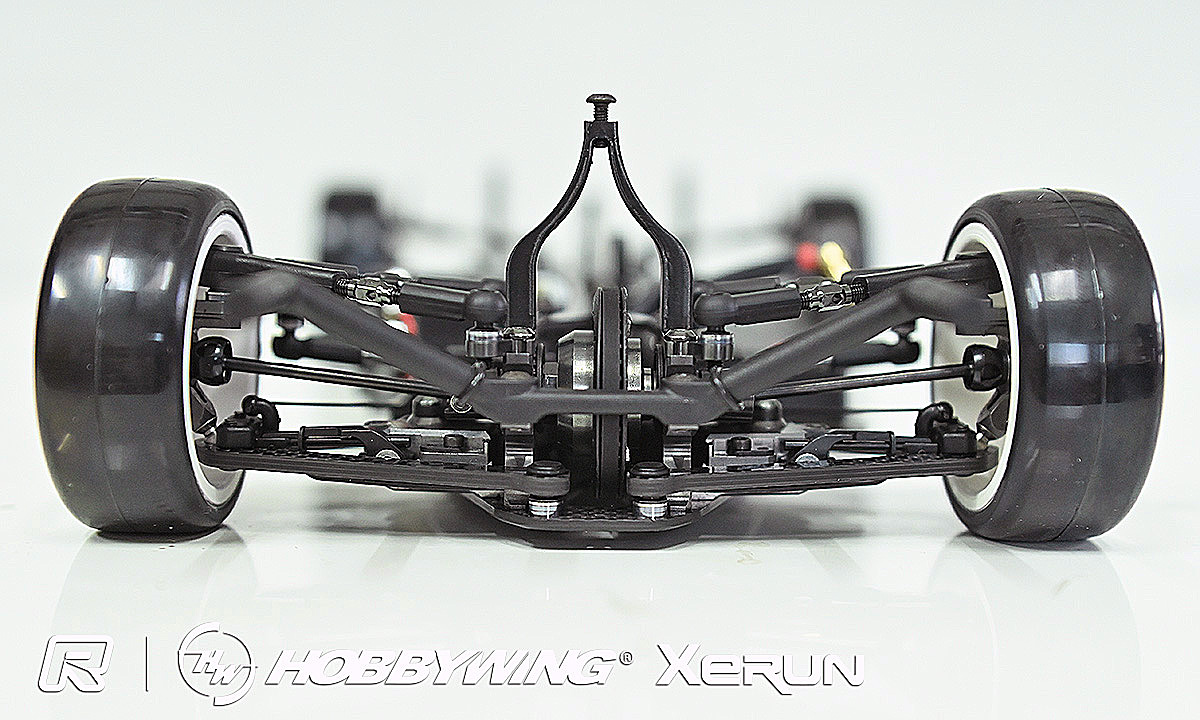
- Hard spring setting at low ride height: One of the winning combo to improve driveability and fight traction rolling at the same time (surprisingly barely affected the ride over bumps).
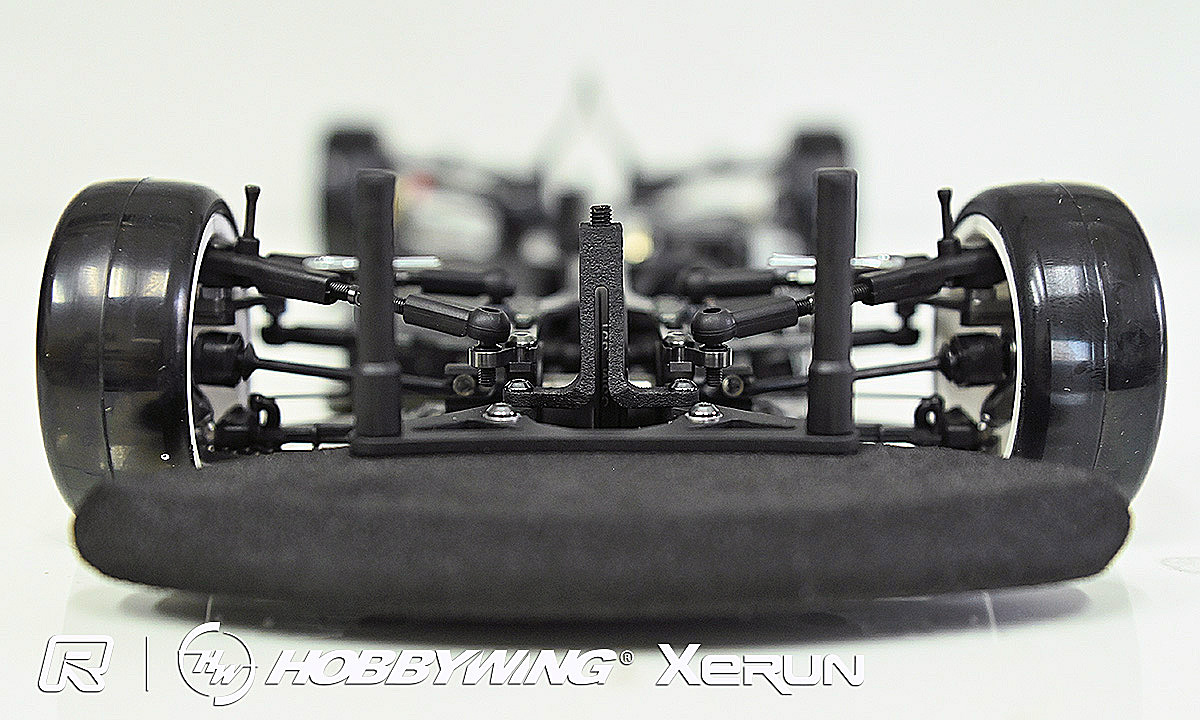
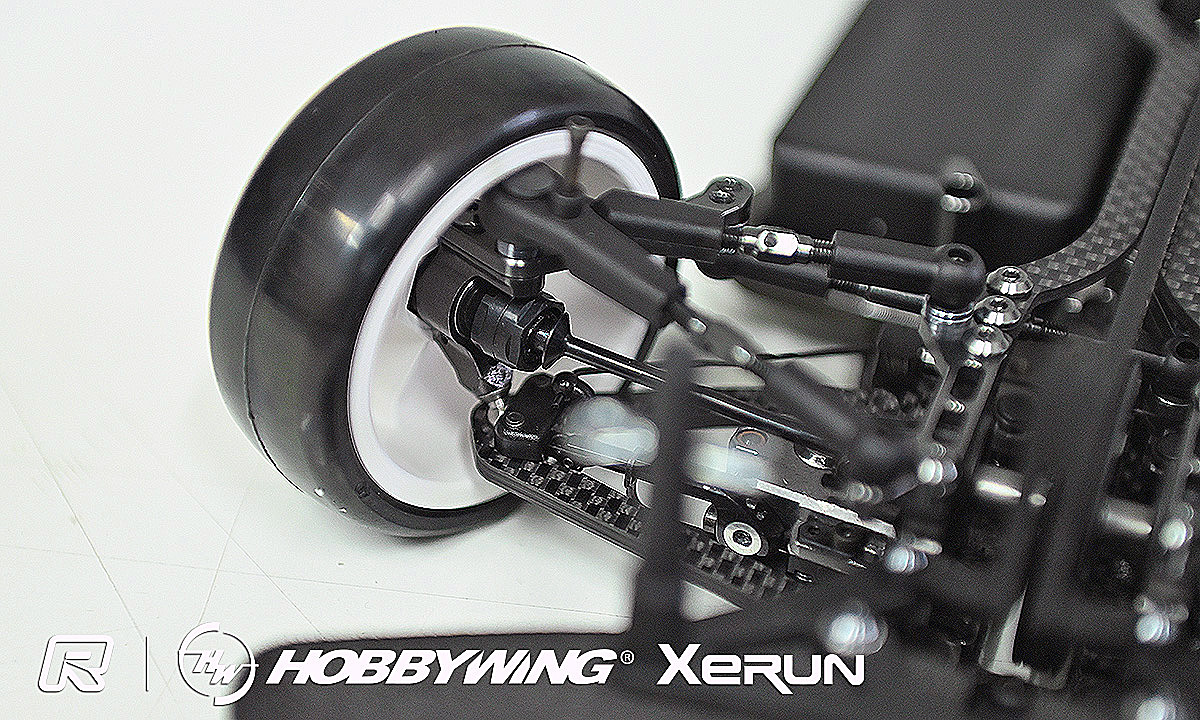
- Anti squat + anti dive (ALL the anti dive!): Also improved driveability, and fixed an issue where the car was "wrapping" the low speed corners too much. Essentially allowing to drive the car harder in and out of the corners.
- Low diffs: less grip and less roll, car squares the corners better allowing to drive simpler lines (allowing more of a V-shape cornering style).
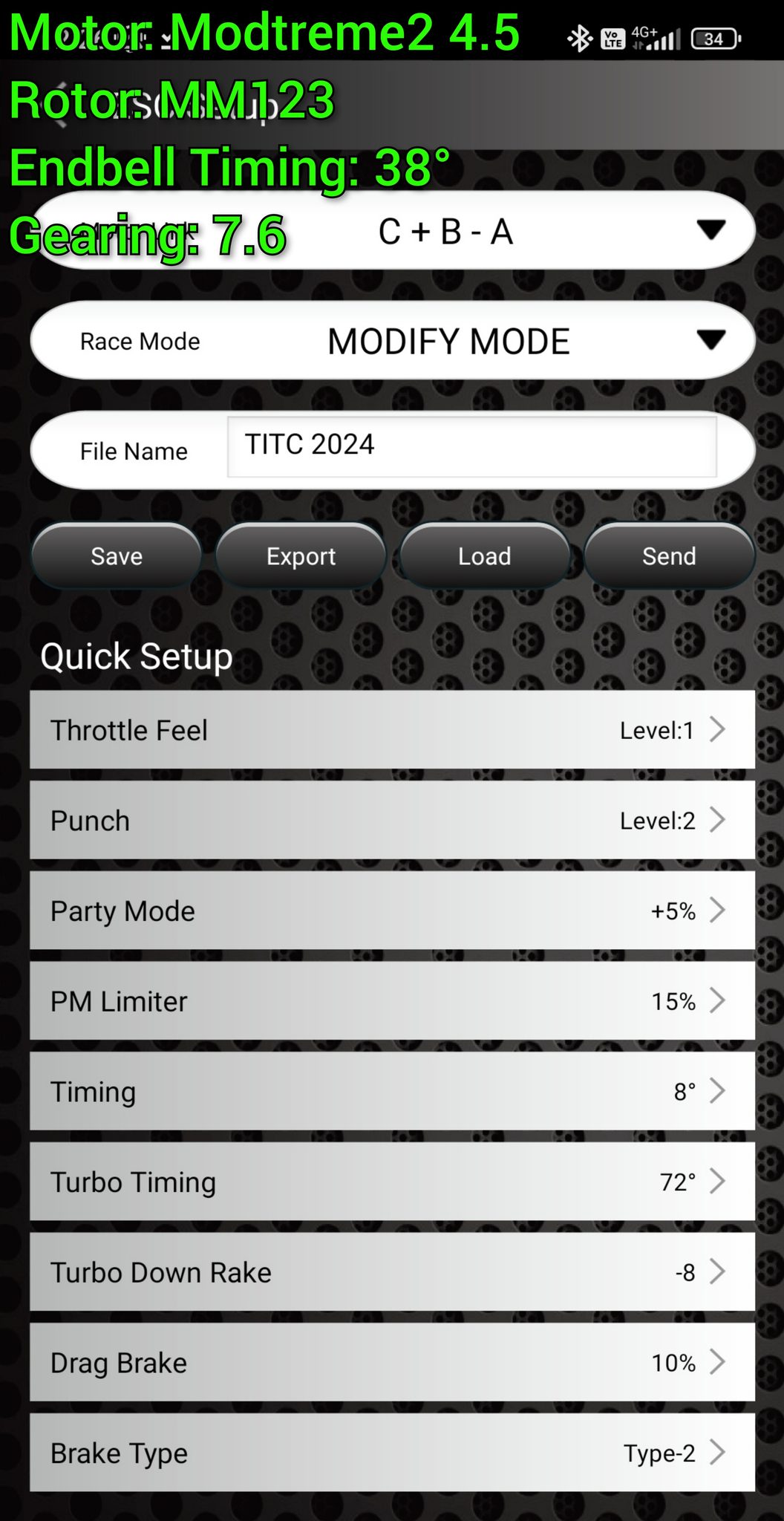
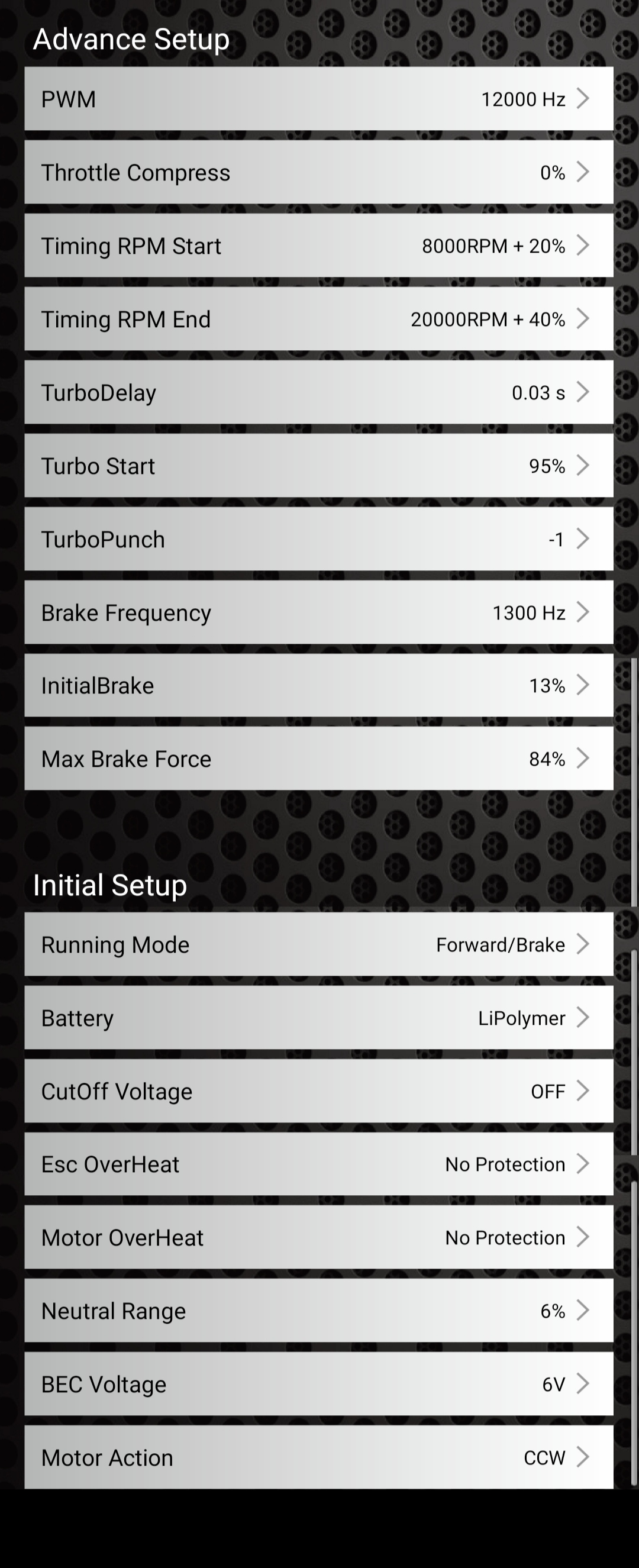
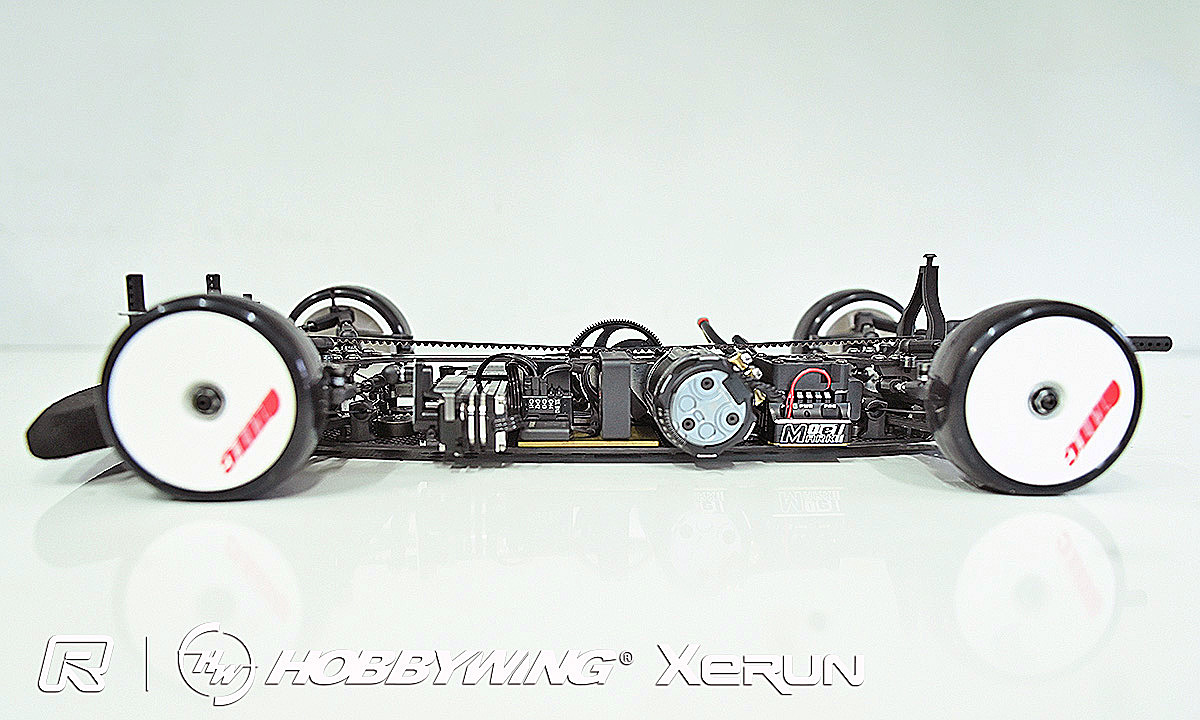
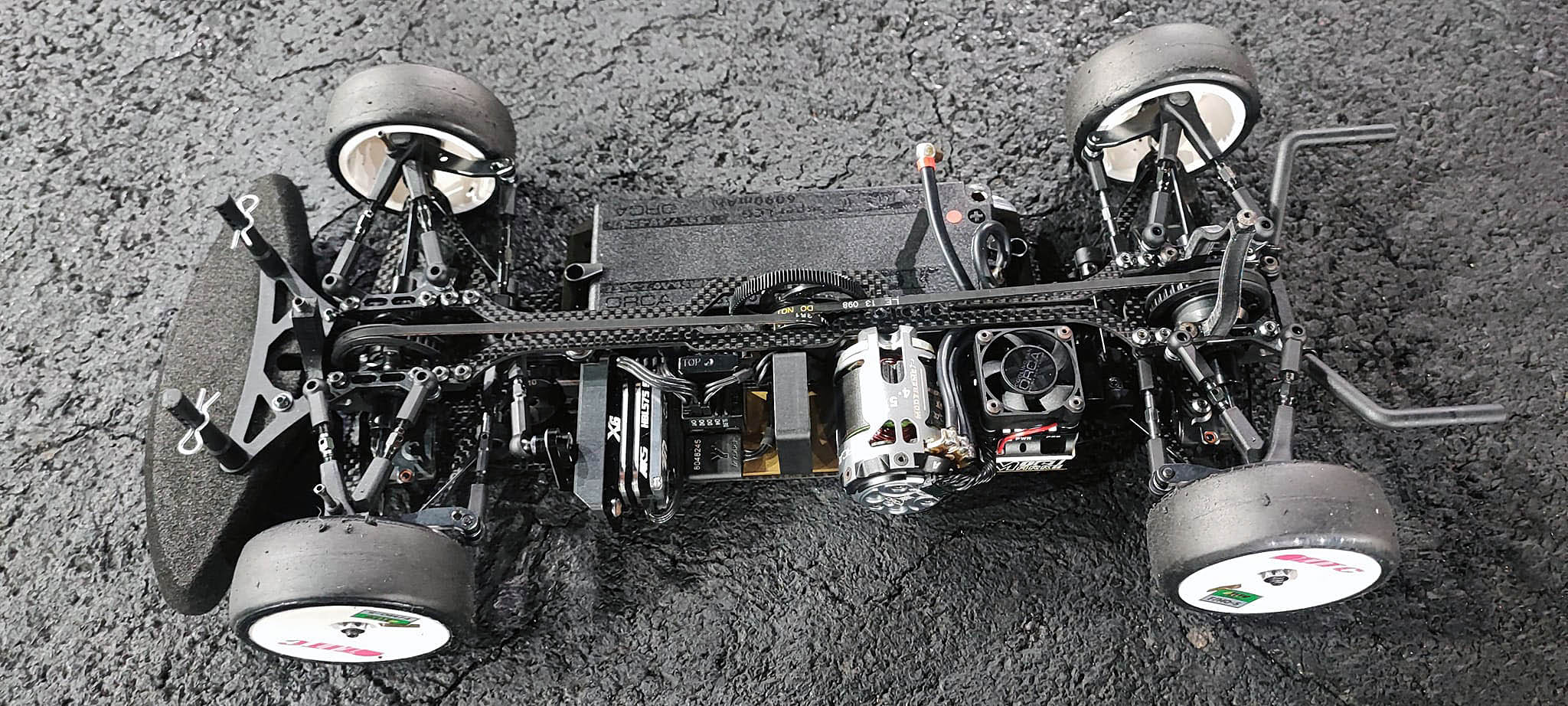
On the side of the electronics finding the correct balance between adequate power while keeping overheating and battery life in check proved to be quite the challenge with the heat and traction levels combined. In the end I am happy with compromise that I found.
Note: The Modtreme2 motor is less powerful and smoother compared to the previous mod motor generation hence the higher mid range and top end power settings.
|