The DEX210 buggy has a vast array of tuning possibilities and the most notable of these is the changeable motor position. How and why to change the motor position, and the possible effect it will give on the race track aren’t quite as obvious however.
Rear-Motor VS Mid-Motor layouts
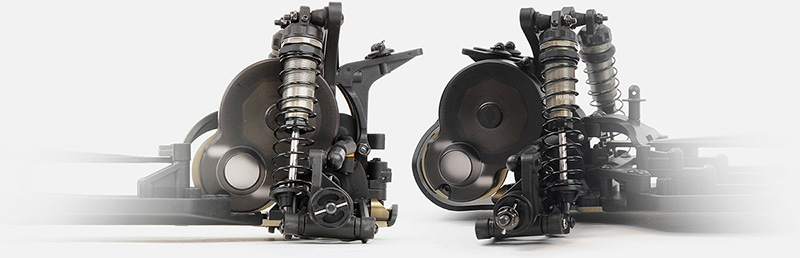
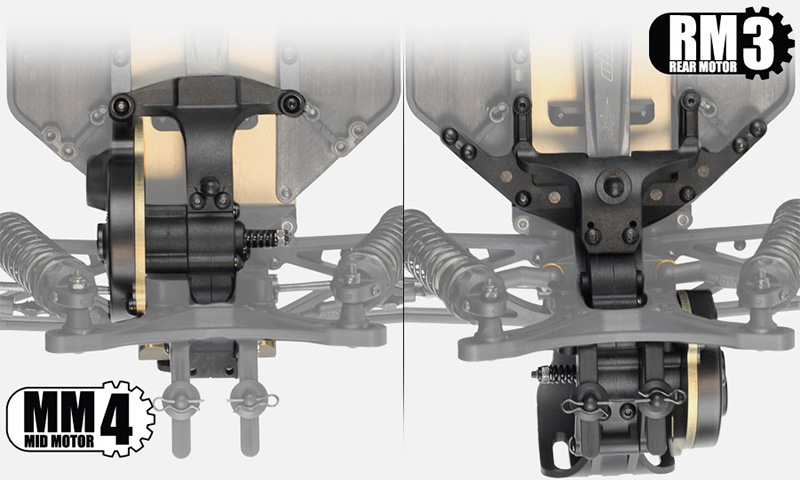
 Running the DEX210 in rear motor or mid-motor will have dramatic affects on the driveability of the car on different surfaces. Put simply, the rear-motor layout will have more weight over the rear wheels for better traction at the expense of steering; the motor will have some degree of pendulum effect and the more widely-spaced weight distribution will heighten the inertia when turning, so the car will naturally be a little slower to react. The mid-motor layout places the motor and battery further forward in the chassis giving more steering and the more compact weight distribution will have a lower inertia, allowing the car to rotate more quickly.
Running the DEX210 in rear motor or mid-motor will have dramatic affects on the driveability of the car on different surfaces. Put simply, the rear-motor layout will have more weight over the rear wheels for better traction at the expense of steering; the motor will have some degree of pendulum effect and the more widely-spaced weight distribution will heighten the inertia when turning, so the car will naturally be a little slower to react. The mid-motor layout places the motor and battery further forward in the chassis giving more steering and the more compact weight distribution will have a lower inertia, allowing the car to rotate more quickly.

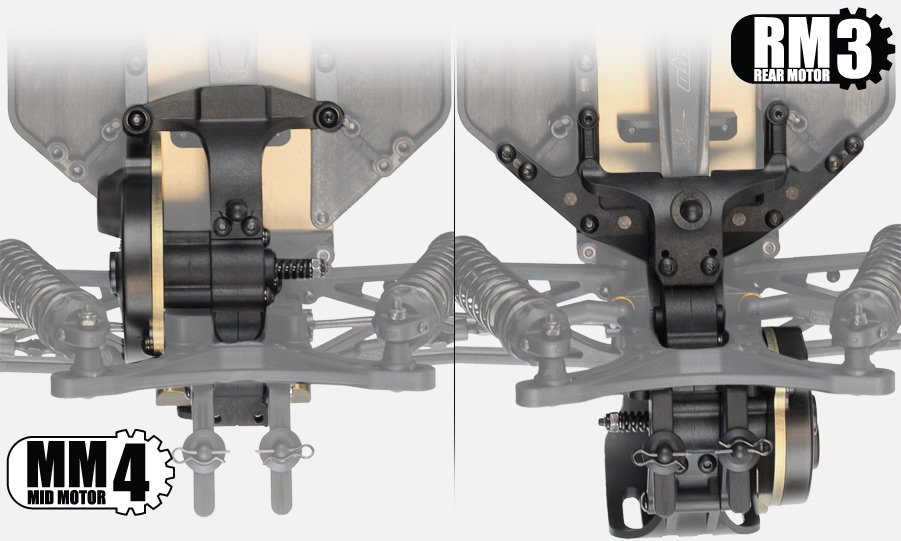
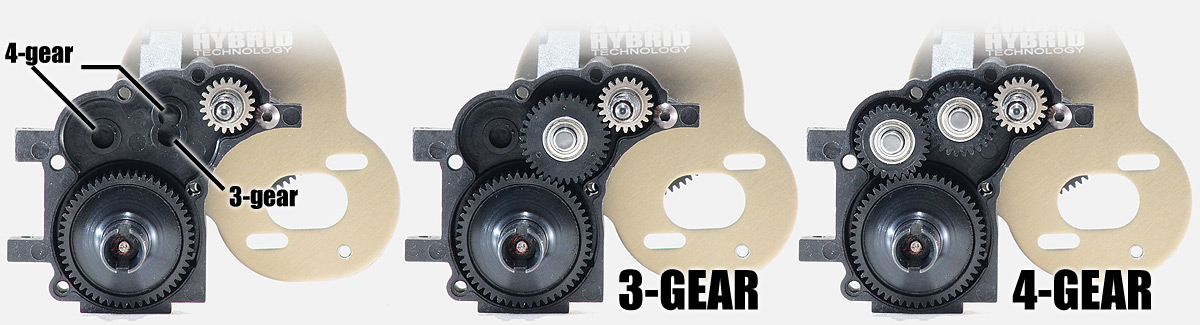
As well as the physical motor position, mid and rear, the DEX210 also allows you to run in either 3 or 4 gear setups in both positions. This allows the racer to run the motor in the same direction as the wheels (4-Gear) or reversed (3-Gear) – allowing the torque of the motor to either fight (3-Gear) the effect of the spinning wheels and differential or work with them (4-Gear).
The number of gears refers to the total number inside the gearbox – with the layshaft gear and differential gear being driven by either one or two idler gears, giving 3 or 4 gears in total. The idler gears have no effect on gear ratios since they simply transmit the power from the layshaft gear down to the differential.

The traditional rear-motor format is a 3-Gear setup, with the motor shaft facing to the right, and the motor spinning backwards. This reduces the chance of wheelies. The most popular mid-motor layout has the motor facing to the left and running in the same direction as the wheels. This gives more control in the air and more traction at the rear tyres under acceleration.
RM3 - Rear Motor, 3-Gear
This is the most common configuration for cars running on a dirt type surface.
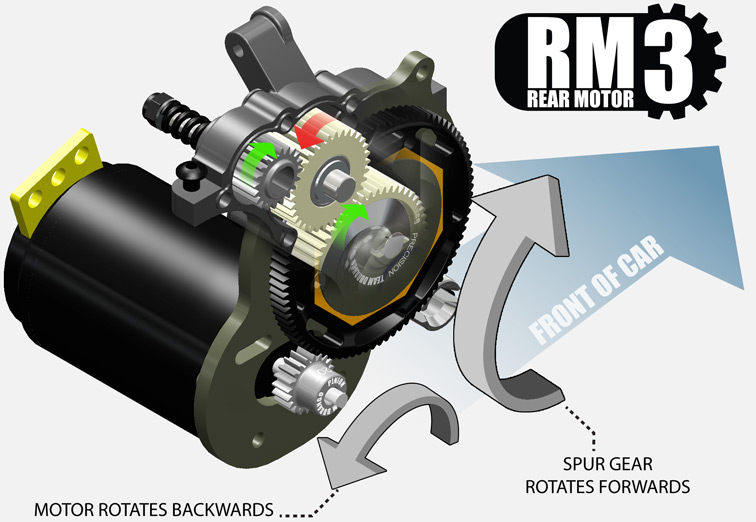
The rotation of the motor is in the opposite direction to the rotation of the wheels. The torque of the motor is in opposition to the rotation of the motor and is ‘aimed’ between the motor and the contact patch of the tyre. This causes the rear end to squat under acceleration, aiding forward traction whilst keeping wheelies to a minimum. The cars weight distribution is also more biased to the rear in this configuration than MM configurations. The car will tend to jump with a nose-up attitude compared to MM configurations.
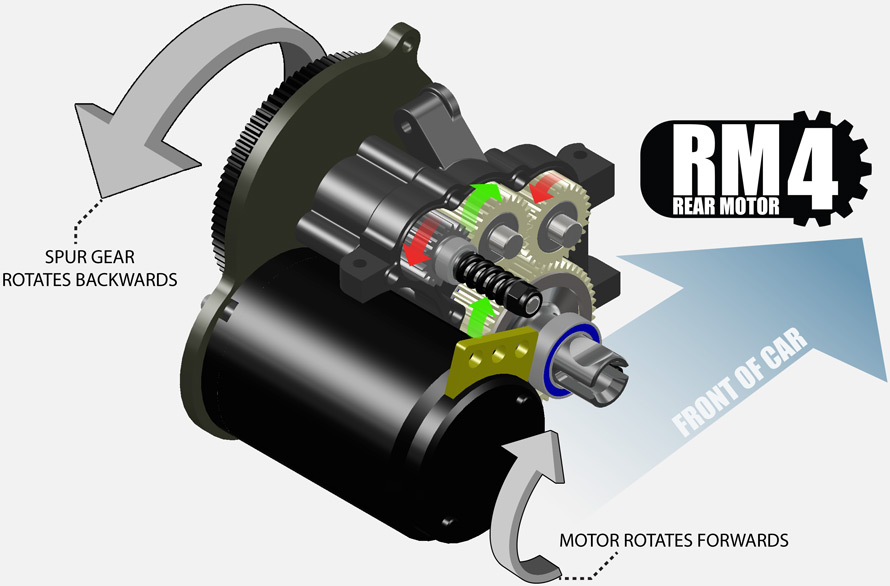
RM4 - Rear Motor, 4-Gear
This configuration hasn’t been seen on a 2wd car before.
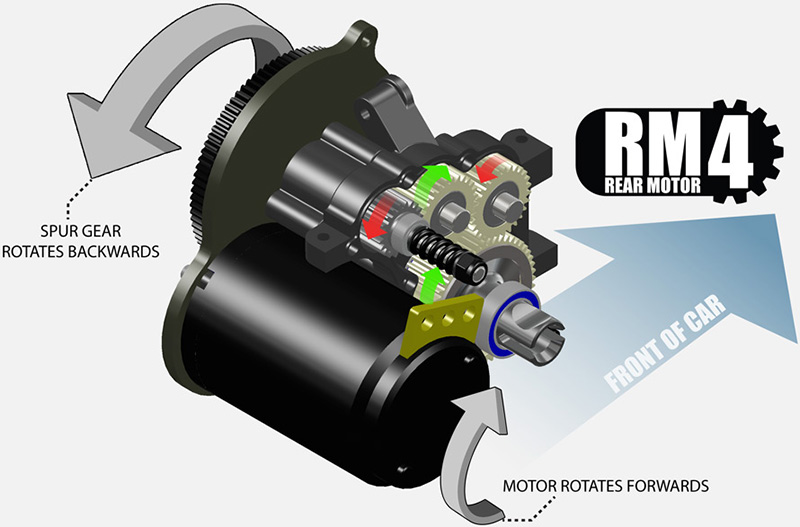
The rotation of the motor is in the same direction as the rotation of the wheels. The torque of the motor is in opposition to the rotation of the motor and is ‘aimed’ behind the motor making the rear of the car squat much more under acceleration. This can provide better rear traction, but the car will have a greater tendency to perform a wheelie. The car’s weight distribution is also more biased to the rear in this configuration than MM configurations. The car will tend to jump with more of a nose-up attitude than in MM configurations.
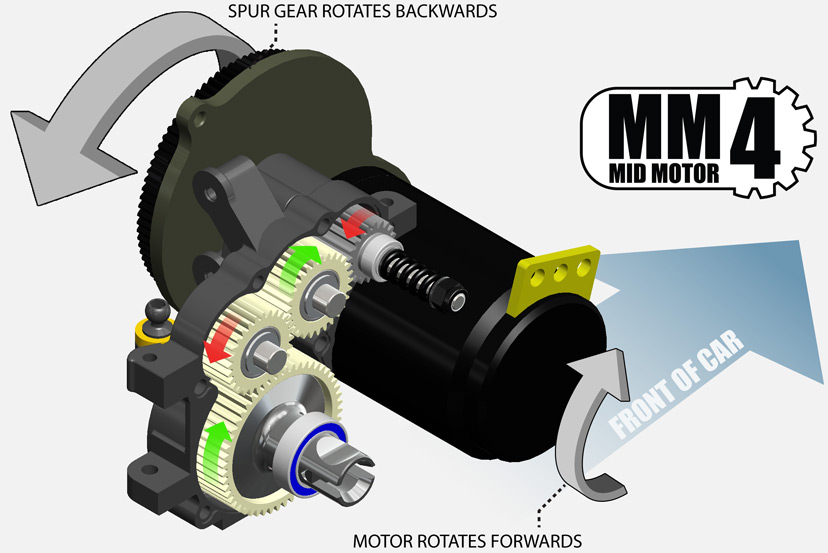
MM4 - Mid Motor, 4-Gear
This is the most common configuration for cars running on a high grip surface eg. artificial turf and carpet style tracks.
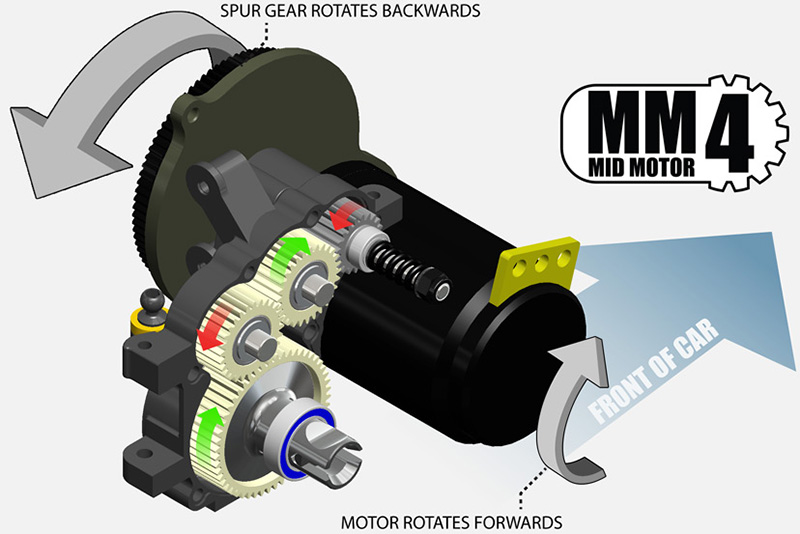
The rotation of the motor is in the same direction as the rotation of the wheels. The torque of the motor is in opposition to the rotation of the motor and is ‘aimed’ between the motor and the contact patch of the tyre. This causes the rear end to squat under acceleration aiding forward traction whilst keeping wheelies to minimum. The cars weight distribution is also more biased towards the front than in RM configurations. The car will also tend to jump with a more level attitude than in RM configurations.
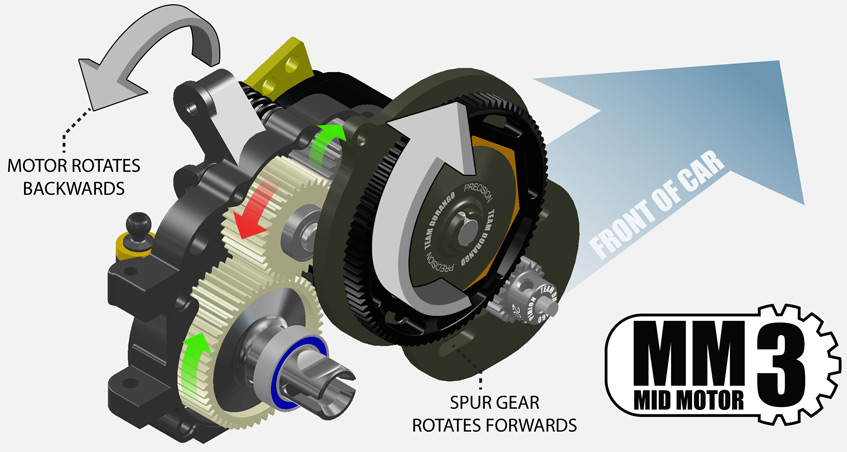
MM3 - Mid Motor, 3-Gear
This was the first orientation for most early Mid Motor conversions. It is still suitable for cars running on a high grip surface eg. artificial turf and carpet style tracks.
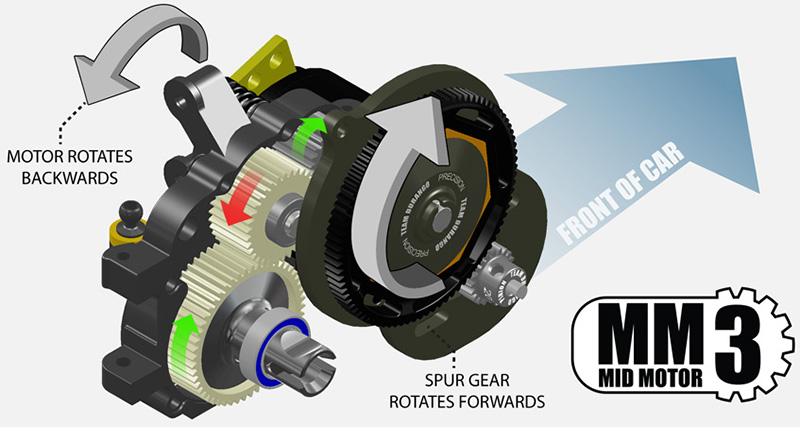
The rotation of the motor is in the opposite direction to the rotation of the wheels. The torque of the motor is in opposition to the rotation of the motor and is ‘aimed’ in front of the motor. This causes the rear end to squat very little under acceleration and provides very little mechanical grip unless there is already sufficient grip from the tyres. Thus forward traction is not as high as MM4. The car’s weight distribution is also more biased towards the front than in RM configurations. The car will also tend to jump with a more level attitude than in RM configurations.
RM (Rear-Motor) cars have a much larger pendulum effect when sliding, and an RM car will take more effort to start sliding – but once sliding it will take longer to stop sliding and re-gain forward momentum.